- # RC 舵机信号对比:PWM vs (One-shot)-PART-单脉冲-舵机
关键字:单脉冲, On-shot, PWM, 舵机, 自动化控制
## 背景 - RC 舵机控制信号本质是脉冲宽度决定角度 - 标准 PWM 周期长(20ms),脉冲占比低(1–2ms),大部分周期浪费 - 对于 高速多舵机、无人机飞控、高精度机械臂,传统 PWM 响应慢、精度不够 - 单次脉冲 / One-shot:每次触发输出一次脉冲,脉冲短、刷新快,解决延迟和精度问题
---
## 核心问题 - Standard PWM:周期长,精度有限,响应慢 - 单次模式:只输出一次脉冲,精度高、刷新快
---
## 单次模式优势 - 高精度:脉冲宽度充分利用计时器 - 低延迟:可提前触发下一脉冲 - 灵活控制:脉冲间隔可软件或硬件管理 - 适用场景:无人机飞控、高速多舵机、高精度机器人
---
## 循环 PWM vs 单/多脉冲
| 特性 | Standard PWM | 单/多脉冲 | | -------- | -------------- | ------------------------------ | | 输出方式 | 每 20ms 循环 | 每次触发一次 | | 脉冲占比 | 5–10% | 100% 时间用于脉冲 | | 精度 | 中等 | 高 | | 响应速度 | 慢 | 快 | | 使用场景 | 普通航模、舵机 | 高速无人机、多舵机、高精度控制 |
---
## 协议示例
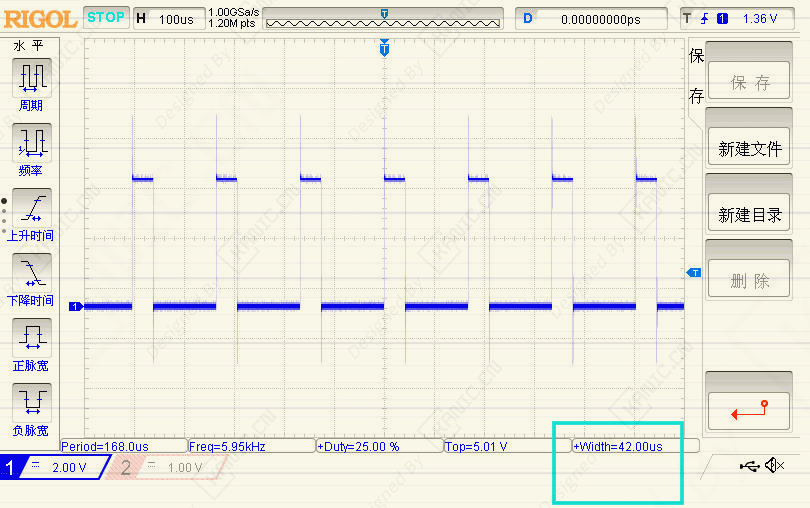
| 协议 | 脉冲/周期 | 特点 | | ------------- | ----------------- | ------------------------ | | 标准 PWM | 1–2ms / 20ms | 普通 RC 舵机 | | 单脉冲125 | 125–250μs / 500μs | 快速单次脉冲,多舵机控制 | | 单脉冲42 | 42–84μs / 168μs | 更短脉冲,高刷新率 | | 多脉冲 | 5–25μs / 50μs | 极高速、多通道 | | DShot150–2400 | 16-bit 数字包 | 数字协议,高精度低延迟 |
---
## 举例
- 这是一个自己做的单脉冲程序(如 单脉冲42),波形上显示循环脉冲,是因为 Simulink 里设置了循环输出,实际可以单次触发控制。
## 结论 - 单次模式解决 Standard PWM 精度低、响应慢问题 - 高速、多舵机、高精度场景必选单次/数字协议 - 普通航模、低速舵机用 Standard PWM 就够
## 说明
>本文相关代码与实验案例已整理至 GitHub(KANIC-lab/KANIC),主要用于自动化控制实验、半实物仿真及控制算法验证。
★ 适用场景: - 自动化控制课程实验搭建 - 研究生论文实验验证 - 控制系统与硬件联调测试
◆ 如需获取以下内容: - 实验系统配置方案 - 设备租赁与替代方案 - 控制实验快速搭建路径
请通过 GitHub 或文章编号(如 EXP-XXXX-XXX)联系,并说明具体实验需求。